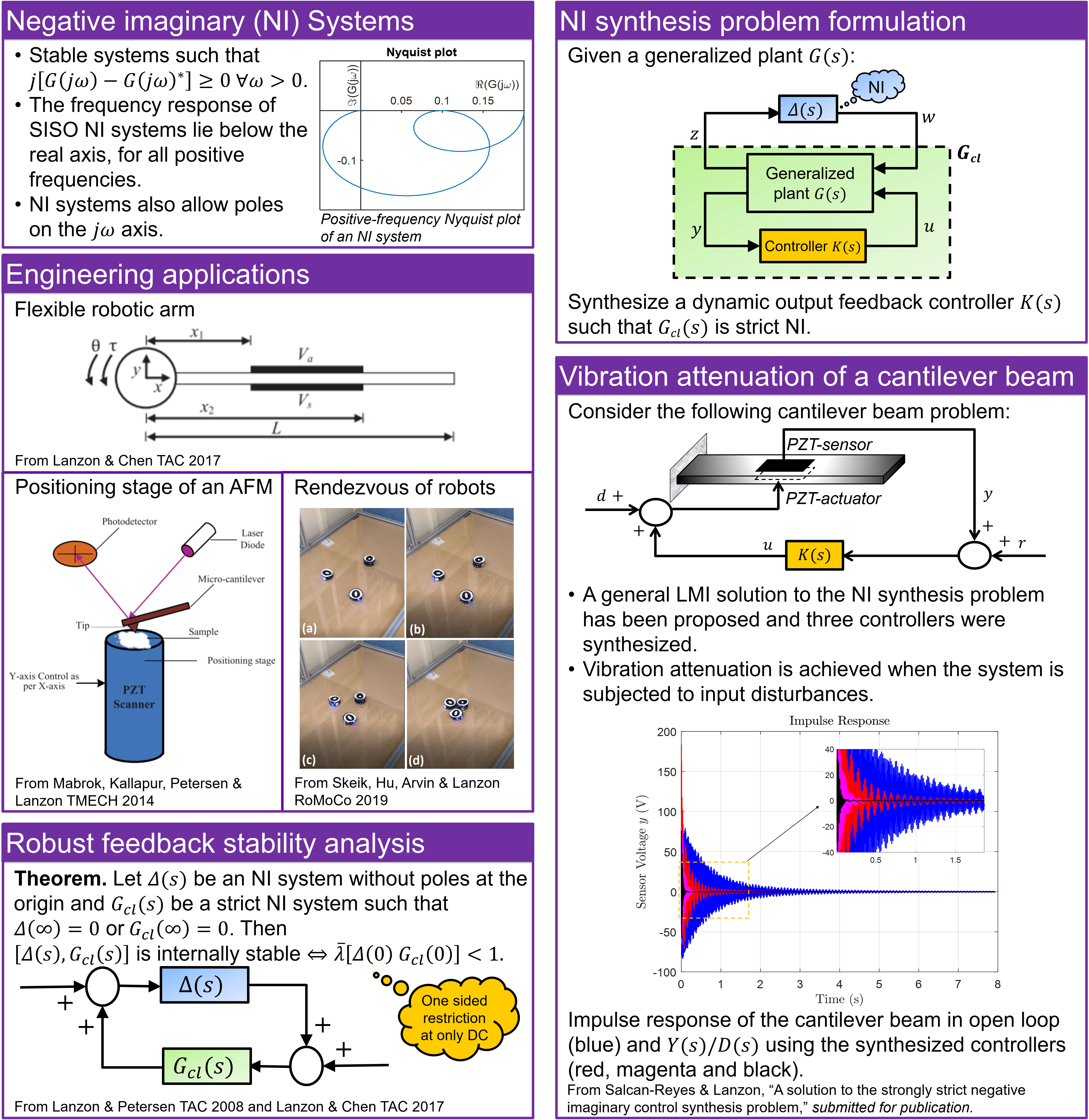
Robust Control / Negative Imaginary Systems Robust Control / Negative Imaginary Systems We develop advanced robust control theory tailored for specific mechatronic, robotic and multi-agent problems. An example of this is our pioneering work on negative imaginary systems theory.